
Lihlahisoa
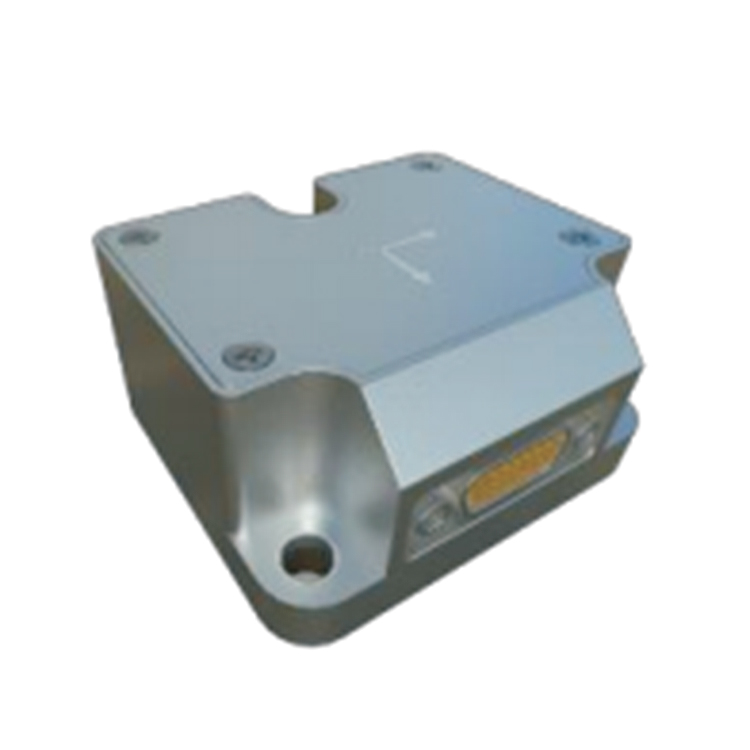
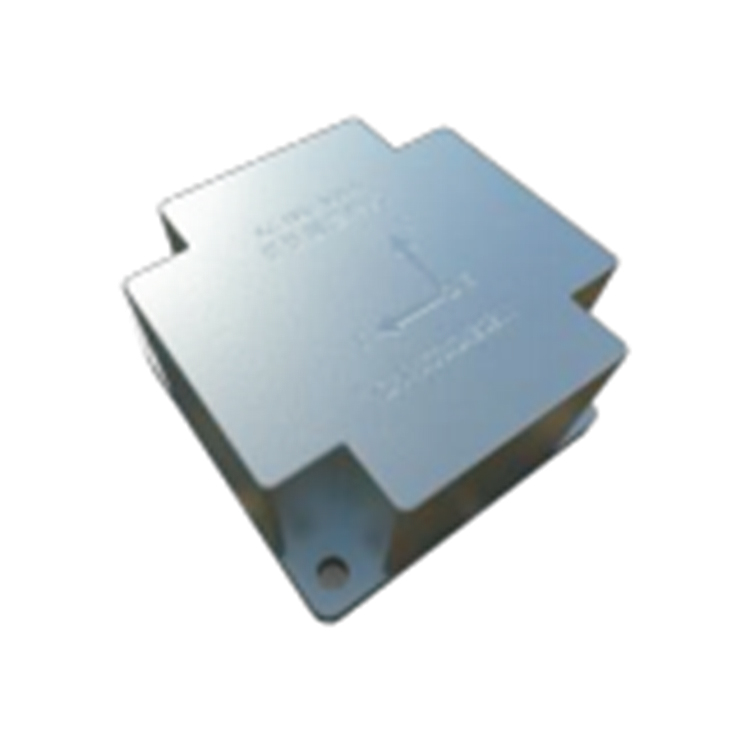
JD-M303A MEMS gyroscope ea li-axis tse tharo
Likarolo tsa sehlahisoa
Sebaka sa kopo:E ka sebelisoa ho sistimi ea servo, navigation e kopaneng, sistimi ea litšupiso tsa maikutlo le likarolo tse ling.
Ho ikamahanya le tikoloho:Ho thothomela ho matla le ho hanyetsa ho thothomela, ho ka fana ka leseli le nepahetseng la lebelo la angle ho -40 °C ~ +85 °C
Nepahetseng e phahameng:ho sebelisa gyroscope e nepahetseng haholo. ho nepahala ha taolo ho molemo ho feta 40urad.
Lifaele tsa kopo:
Bofofisi:motho ea batlang, optoelectronic pod
Naha:turret, sethala sa botsitso ba setšoantšo
Naha:sethala sa botsitso ba setšoantšo, sistimi ea servo

Litekanyetso tsa ts'ebetso ea sehlahisoa
| Sehlopha sa Metric | Lebitso la Metric | Metric ea Ts'ebetso | Litlhaloso | ||
| Gyroscope mekhahlelo | Lekhalo la ho lekanya | ±500°/s | |||
| Scale factor repeatability | <50ppm | ||||
| Scale factor linearity | <200ppm | ||||
| Ho tsitsa ka leeme | <5°/h(1σ) | Boemo ba bo-10 ba sesole ba naha bo boreleli | |||
| Ho hloka botsitso ka leeme | <1°/h(1σ) | Allan Curve | |||
| Ho pheta-pheta ka leeme | <3°/h(1σ) | ||||
| Angular random walk (ARW) | <0.15°/√h | ||||
| Bophahamo ba motlakase (-3dB) | 200Hz | ||||
| Ho lieha ha data | <1ms | Ho lieha ha puisano ha hoa kenyelletsoa. | |||
| SehokediCbohlasoa | |||||
| Mofuta oa sehokelo | RS-422 | Sekhahla sa Baud | 460800bps (e ka khonahala) | ||
| Sekhahla sa ntlafatso ea data | 2kHz (e ka tloaeleha) | ||||
| TikolohoAho tenyetseha | |||||
| Boemo ba mocheso o sebetsang | -40°C~+85°C | ||||
| Sebaka sa mocheso oa polokelo | -55°C~+100°C | ||||
| Ho thothomela (g) | 6.06g (rms), 20Hz ~ 2000Hz | ||||
| MotlakaseCbohlasoa | |||||
| Matla a kenang (DC) | +5V | ||||
| Ea namaCbohlasoa | |||||
| Boholo | 44.8mm * 38.5mm * 21.5mm | ||||
| Boima ba 'mele | 50g | ||||
Kenyelletso ea Sehlahisoa
E 'ngoe ea melemo ea mantlha ea JD-M303A MEMS 3-axis gyroscope ke boholo ba eona bo kopaneng. Ka ho lekanya bophara ba lisenthimithara tse seng kae feela, sesebelisoa sena se bobebe se ka kopanngoa habonolo mefuteng e mengata ea lisebelisoa tse fapaneng, e leng se etsang hore e be se loketseng ho baenjiniere le bahlahisi ba liindasteri tse sa tšoaneng.
Moko oa JD-M303A MEMS gyroscope ea li-axis tse tharo ke gyroscope ea lapeng e nepahetseng haholo, e ka hlahisang data ea lebelo la angular ka ho nepahala ho fetisisa. Lintlha tsena li kopanngoa le li-algorithms tse tsoetseng pele tsa matšeliso a mocheso le lipalo tsa inertial unit calibration ho netefatsa hore tlhahiso ea data e lula e tšepahala ebile e nepahetse.
Ntho e 'ngoe ea bohlokoa ea JD-M303A MEMS gyroscope ea li-axis tse tharo ke tšebeliso ea eona e tlaase ea matla. Sena se bolela hore e ka sebelisoa mefuteng e mengata ea lits'ebetso ntle le ho hatisa phepelo ea motlakase, e bohlokoa haholo bakeng sa lisebelisoa tse sebelisoang ke betri.
- Boholo le Sebopeho li ka Itloaeloa
- Lipontšo li Koahetse Mefuta Eohle ho tloha ho ea Tlase ho ea holimo
- Litheko tse tlaase Haholo
- Nako e Khutšoanyane ea Phano le Maikutlo a nakong
- Lipatlisiso tsa Tšebelisano-'moho ea Likhoebo tsa Sekolo Ntlafatsa Sebopeho
- Own Automatic Patch le Assembly Line
- Own Environmental Pressure Laboratory
Lihlahisoa tse Amanang
-

JD-M302 MEMS gyroscope ea li-axis tse tharo
-
JD-IMU-M01 IMU e sebelisa gyroscope e nepahetseng haholo...
-

JD-M202 MEMS gyroscope ea li-axis tse peli
-

CB-2 Single Prism EL All Weather Target Plate
-
IMU-M17 MEMS tekanyo ea tekanyo ea inertia
-

IMU-M05B – Boemo bo phahameng ba boemo bo phahameng ba inertial...