
Blog
-

Mojule oa ho fetolela oa I/F ke eng
I/F conversion circuit ke potoloho ea hona joale / khafetsa ea phetoho e fetolang analog ea hona joale hore e be maqhubu a pulse. I/F conversion circuit ke potoloho ea hona joale/frequency e fetolang ana...Bala haholoanyane -
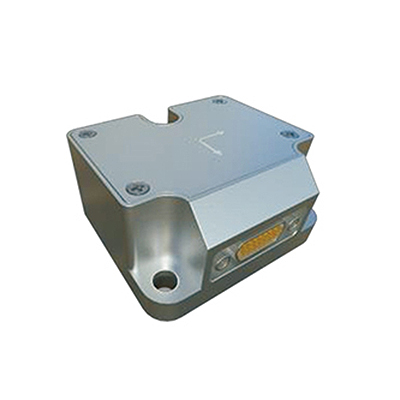
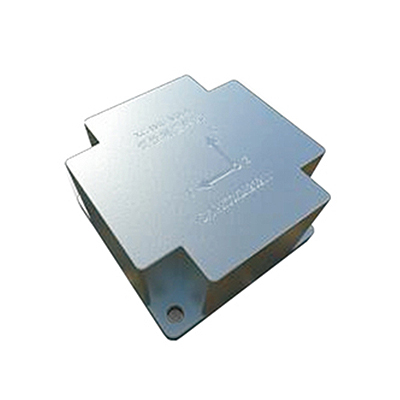
Lisebelisoa tsa li-sensor tsa Inertial Measurement Unit (IMU).
Inertial measurement unit (IMU) ke sesebediswa se sebedisetswang ho metha thlo-axis attitude Angle (kapa lebelo la angular) le matjato a ntho. Lisebelisoa tsa mantlha tsa IMU ke gyroscope le accelerometer. W...Bala haholoanyane -
Tsamaiso ea maikutlo ke eng
Sistimi ea maikutlo ke sistimi e khethollang sehlooho (sehlooho) le maikutlo (ho phahama le ho phahama) ha koloi (sefofane kapa sefofane) mme e fana ka matšoao a sehlooho le maikutlo ho sistimi ea taolo ea othomathike le naviga...Bala haholoanyane -
Setsi sa Tekanyo sa Inertial se Fetolela Sistimi ea ho Tsamaisa
Likarolo tsa Melato ea Inertial (IMUs) e se e le theknoloji e tsoetseng pele e fetolang mekhoa ea ho tsamaisa likepe ho pholletsa le liindasteri. E kenyelletsa li-gyroscopes, accelerometers le magnetometers, lisebelisoa tsena li fana ka ho nepahala le ho ts'epahala ha ho latela motsamao le tlhophiso. Ka kakaretso...Bala haholoanyane -
Navigation e kopaneng ea inertial: phetoho ea phetoho theknolojing ea ho sesa
Khatelo-peleng e kholo, bafuputsi ba fihletse katleho ea theknoloji ea ho sesa ka ho hlahisa mokhoa o kopaneng oa ho sesa oa inertial. Tsoelopele ena ea phetoho e ts'episa ho hlalosa tsela eo re tsamaeang ka eona, e tlisa ho nepahala, ho nepahala le ho ts'epahala ho liindasteri tse itšetlehileng haholo ...Bala haholoanyane -
Gyroscope e nang le li-axis tse tharo e fetola ho sesa le liroboto ka nepo le bokhoni bo ke keng ba bapisoa.
Ka tsoelo-pele e tsotehang, li-gyroscopes tsa morao-rao tse nang le li-axis tse tharo li hlahile e le moeli o mocha oa ho tsamaea le liroboto, tse bontšang ho nepahala le ho sebetsa ka mokhoa o ke keng oa lekanngoa o tšepisang ho fetola mefuta e mengata ea liindasteri. Ho kopanya theknoloji e tsoetseng pele le boenjiniere ba maemo a holimo ...Bala haholoanyane